Some time ago I wrote about the Great Hexapod Revolution, which I might also have called the Quite Considerable Hexapod Revision. At any rate, that particular revolution or revision has conceptually been completed for quite some time, so I am busy revising old paintings as well as coming up with new ones. The latter are not really necessary as The Book is basically done.
Yes, The Book is done.
Basically.
The 'done' part means that there are easily enough double pages to fill a book, so rather than producing more I am shifting emphasis towards finding a publisher. I do not expect immediate success, which explains 'basically': I might meanwhile just as well keep on thinking about Furahan creatures.
Let's review the hexapod revision. Their skeleton still reflects that of early representatives of the clade. There is no vertebral column, here defined as many short similar bones placed end to end running from front to back in the vertical plane dividing left and right halves of the animal (technically, the sagittal plane). The most bare bones version of that skeleton (sorry for that one) would remind you of a foldable ladder. As the clade started with animals without legs, it would be strange to use the name Hexapods ('six-leggers') for all of them. I chose the new name 'Scalata' instead, based on the Latin word 'scala': ladder. The word 'Scalata' is technically correct while 'scalates' is suitable for colloquial use. Hexapods then become a subgroup, consisting of scalates with legs.
 |
| Click to enlarge; copyright Gert van Dijk |
The next big step was deciding the shape of the legs. I built on the zigzag principle, in which successive major leg segments bend one way at the topmost joint, the other way at the second joint, and so on. By reversing direction, no joint is ever really far away from a line perpendicular from the hip down. Being close to that line reduces the force needed to keep the joints in those positions, meaning muscle power. have a look at these posts here and here. The image above was taken from these earlier posts and explains that principle.
The least force to keep the segments in place is needed when all segments are stacked vertically, making the leg into a column. That is a fine way to conserve energy but does not produce athletic animals. Vertical leg bones are typically found in large non-athletic animals: think of elephants and sauropods. In smaller animals all segments can be closer to the horizontal than the vertical position, because fighting gravity costs relatively much less (for scaling effects, see here and here). The actual position of the leg bones will depend on mass and athleticism.
I suggested in earlier posts (here and here) that it wouldn’t really make a difference whether the legs started by being angled forwards ('zig') or backwards ('zag') at the hip joint. Mammals are peculiar in having their front legs start with a zag and hind legs with a zig. This is a consequence of how they re-engineered their original sprawling posture: front legs rotated backwards, with elbows pointing back, and hind legs forwards, with knees pointing forwards.
Should that reversal be seen as a natural 'law' or as an evolutionary coincidence that became locked in place? I could not think of any physical reason for this pattern and so had freedom to decide what to do with scalate legs. All three pairs of legs underwent the same rotation, which is simple and keeps them out of each other's way. The top segments all point backwards.
 |
| Click to enlarge; copyright Gert van Dijk |
Another decision was how to join the legs to the scala. Should the hip joint allow movements in all directions, or should they restrict movement in one or more directions? Should the joint be so 'open' that all positions need to be controlled by expensive muscle activity, or do we let bones and ligaments take up some of the stresses? I decided to give the joint surface a 'roof' in the hip to push against, transferring weight. The image above shows three possible patterns: in A, the bone sits directly underneath the spherical joint, allowing three-axial rotations and simple weight-bearing. In B, the joint does the same, but the shaft of the bone is shifted a bit to the side, allowing room for gut, eggs, or whatever. In C, the joint restricts rotations around the axis running down the bone and the bone extends a bit past the joint. That sturdy upwards spur can be used to attach muscles to; that's the hexapod hip joint.
The main propulsion force involves swinging the upper leg segments thighs backwards: retroflexion. The thigh has a limited range of motion, from an angled pointing just a bit forwards to a much larger backwards angle. To work over that range, hexapods have one large muscle starting behind the joint and attaching to the hip bone below the joint, exactly like human buttock muscles. But another big muscle originates in front of the hip and inserts on the spur above the joint. These two muscles act in concert to pull the leg back: they are 'agonists'.
That range of motion has consequences for where muscles can produce the most force. The force exerted by muscle fibres is most effective if these fibres make a right angle with a line from the insertion site to the axis. If that angle is not 90 degrees, only the component of the force that is at a right angle is useful to rotate the bone; the remainder just presses the bone into the joint or pulls it out of it. When the bone rotates, the effective force component changes with the rotation angle. You would want to place a muscle in such a way that most muscle fibres do useful work over most of the movement range.
This animation shows a muscle placed to the front (at left) of the bone, inserting at the spur above the axis of rotation. The bone rotates through its working range, which is shown three times. The four panels show fibres at different sites of origin. The red lines show the parts of the force that do the actual rotation. It is obvious that fibres starting high above the spur are not much use and can even pull in the wrong direction. The most useful fibres start at the level of the joint or lower, so this is where the muscle should be. I have not shown the other muscle, the one pulling on the thigh below the axis while starting behind the joint (at right). The principle is the same, but now the most useful part lies at the top.
As I like Latin anatomical nomenclature for its simplicity, I named these muscles ('simple' is here based on the premise that the names are in another language you have to learn anyway). For the front legs, the front muscle is the musculus retractor artus primi anterior, and the hind one is the m. retractor artus primi posterior. For the middle and hind legs, replace primi with secundi or tertii.
There are of course muscles that work in the other direction, the 'antagonists', but these are weaker and run the other way, lying underneath the big 'retroflexion' muscles.
 |
| Click to enlarge; copyright Gert van Dijk |
 |
| Click to enlarge; copyright Gert van Dijk |
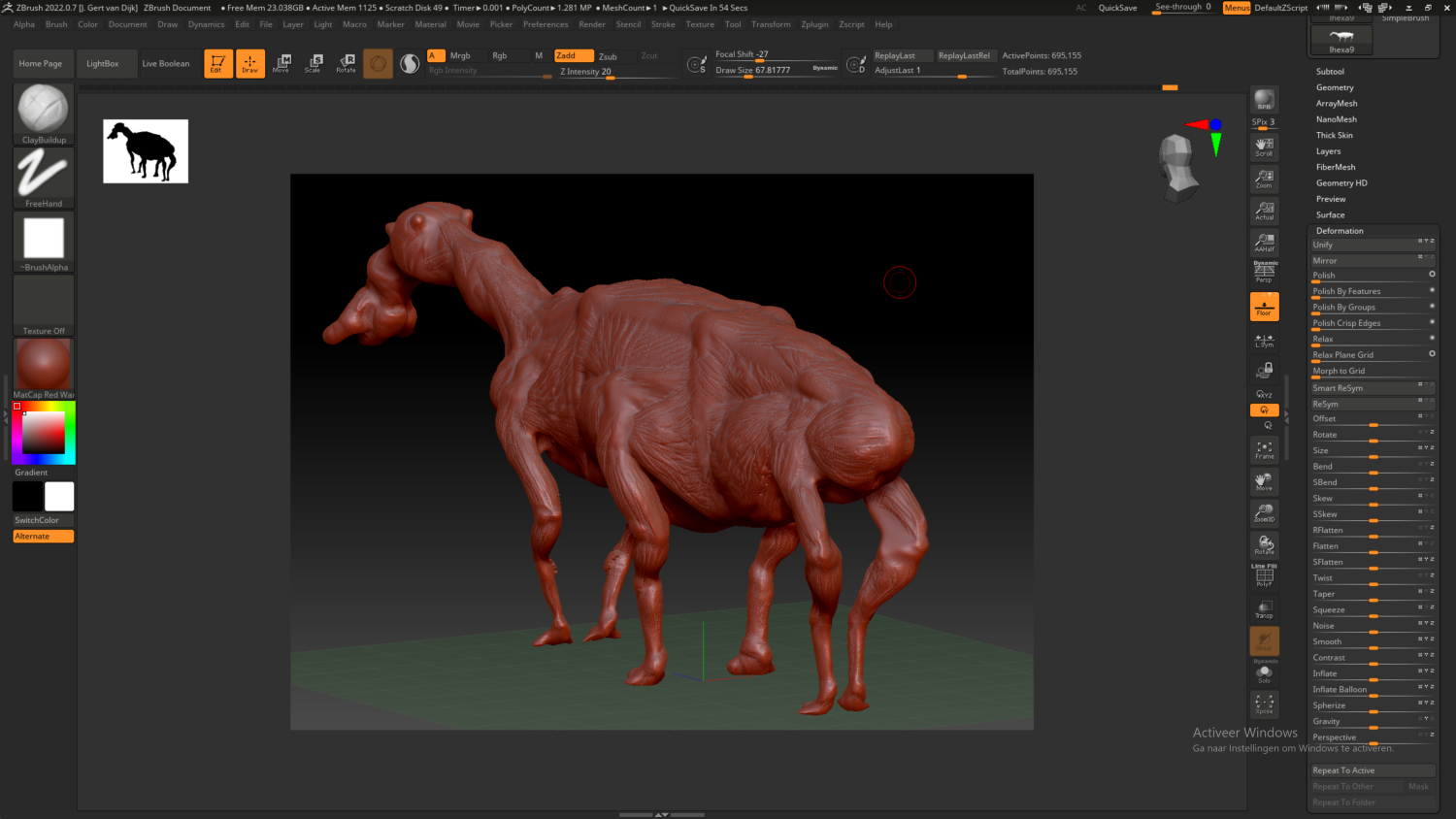
The two images above shows the result of some experimental ZBrush sculpting. Here you see a general hexapod with some main muscles shown. I still find ZBrush extremely non-intuitive, but am very slowly feeling my way around it.
This animal is probably the size of a horse. Note that the middle legs are sturdier than the others. That is because that is where most of the mass is! The middle legs are also wider apart, to allow room for a possibly sizeable gut and also for the front and hind legs. Of course, the scheme underwent substantial changes in particular with those predators that freed their front limbs from locomotion ('centaurism') and turned them into weapons. maybe I’ll show those anatomical changes too, one day.
4 comments:
Most interesting and most impressive. Bravo and kudos!
Shortly after you mentioned that there is no spine per se, and mentioned what there actually was, I thought "Wait...are the Furaha hexapods close kin to the rusps?"
Also, congrats on a major milestone closer to The Book becoming a holdable reality.
-Anthony C. Docimo.
Anthony: The basic skeleton of rusps consists of rings connected by hinged rods making the entire structure like a harmonica. Scalates started with a stiffening rod on each side of the body, providing an attachment for the undulating fins on the left and right. When the fins developed indentations and then split completely, the rods broke up into fairly long bones, still situated at either side of the animal. Bony connections between left and right make the structure resemble a ladder. This has obvious consequences for movement; a major one is the inability of the body to bend left or right! But there are tricks, such as skewing and a quick 90-degree roll followed by bending of the body 'up' or 'down'.
This was an absolutely fascinating read. The sculpt looks fantastically impressive as well.
It's been such a joy to follow along with your project, I hope you find a publisher soon. Good luck!
Petr: thank you. As for the hexapod skeleton, a reader once sent me some drawings of their hypothetical structure. That was probably over 10 years ago, and I have a vague recollection that that was you. Was it indeed you?
Post a Comment